Nacht der Wissenschaft
Informatik, Wirtschafts- und Rechtswissenschaften
Der interaktive Tisch
Prof. Dr. Susanne Boll, Department für Informatik
 Das weltweite Datenaufkommen wächst rasant. Die technische Entwicklung von Verfahren, die diese Datenmengen automatisch auswerten, hält mit diesem Wachstum nicht Schritt. Neben automatisierten Verfahren kommt daher der visuellen Datenanalyse eine besondere Bedeutung zu. Dabei nutzt der Mensch seine herausragenden Fähigkeiten zur Mustererkennung, um aus visuellen Darstellungen Schlüsse zu ziehen. Durch Einbeziehung der menschlichen Intuition und Kreativität können Datenanalysen effektiver durchgeführt werden. An der Universität Oldenburg wurde in Kooperation mit dem Forschungsinstitut OFFIS eine Analyseplattform entwickelt. An einem großformatigen Tisch mit Touchscreen können mehrere Benutzer/innen gleichzeitig mit dem Analysesystem interagieren. Diese direkte Interaktion mit den visualisierten Daten ermöglicht einen intuitiven Zugang.
Das weltweite Datenaufkommen wächst rasant. Die technische Entwicklung von Verfahren, die diese Datenmengen automatisch auswerten, hält mit diesem Wachstum nicht Schritt. Neben automatisierten Verfahren kommt daher der visuellen Datenanalyse eine besondere Bedeutung zu. Dabei nutzt der Mensch seine herausragenden Fähigkeiten zur Mustererkennung, um aus visuellen Darstellungen Schlüsse zu ziehen. Durch Einbeziehung der menschlichen Intuition und Kreativität können Datenanalysen effektiver durchgeführt werden. An der Universität Oldenburg wurde in Kooperation mit dem Forschungsinstitut OFFIS eine Analyseplattform entwickelt. An einem großformatigen Tisch mit Touchscreen können mehrere Benutzer/innen gleichzeitig mit dem Analysesystem interagieren. Diese direkte Interaktion mit den visualisierten Daten ermöglicht einen intuitiven Zugang.
18.00 23.00 Uhr, W3, Demonstration, Mitmachexperiment
Informations- und Kommunikationsgestütztes Nachhaltigkeitsmanagement
Prof. Dr. Jorge Marx Gómez, Department für Informatik
Umwelt und Nachhaltigkeit spielen in der Kommunikation zwischen dem öffentlichen Leben und Unternehmen eine immer größere Rolle. Wie können zum Schutz des Klimas in Gewerbe- und Industriegebieten die CO2-Emissionen gesenkt werden oder wie können Ressourcen-schonend Materialien in produzierenden Betrieben eingespart werden? Der Lehrstuhl für Wirtschaftinformatik entwickelt hierfür Softwarelösungen, die soziale, ökonomische und ökologische Aspekte innerhalb eines Unternehmens berücksichtigen. Es werde einige aktuelle Projekte der Abteilung und der daran beteiligten Studierenden vorgestellt.
18.00 23.00 Uhr, Raum W3 1-154, Informationsstand, Ausstellung
Automatisierte Manipulation nanoskaliger Objekte durch Mikroroboter
Prof. Dr. Sergej Fatikow, Department für Informatik
Langsam kommt der Roboterarm herangefahren. Ein Greifer öffnet sich und greift zu. Ein winziges Objekt wird vorsic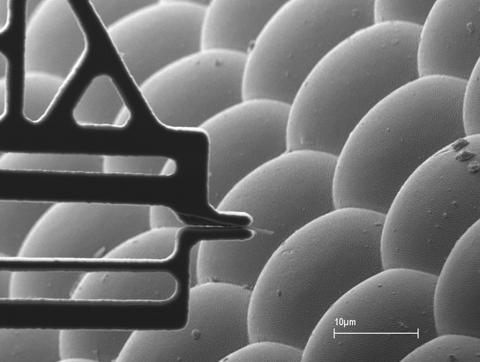 htig gefasst und angehoben, abtransportiert und dann an einem exakt berechneten Standort abgelegt. Diese Szene ist mit bloßem Auge nicht erkennbar, denn der Roboter, der die Arbeitsgänge ausführt, ist ein Mikroroboter. Er kann Bewegungen im Nanometerbereich vollführen, also kleinste Objekte, wie zum Beispiel Kohlenstoff-Nanoröhren hundertmal kleiner als ein Haar handhaben, ohne sie zu zerstören. Visuell überwacht und gesteuert wird die Arbeit des Roboters über ein Rasterelektronenmikroskop. Damit eröffnen sich völlig neue Möglichkeiten z.B. in der Mikrosystemtechnik (neue Sensoren und Aktoren), der Medizin (minimal-invasive chirurgische Techniken) oder der (Bio-)Nanotechnologie (Charakterisierung und Manipulation von Molekülen und biologischen Zellen).
htig gefasst und angehoben, abtransportiert und dann an einem exakt berechneten Standort abgelegt. Diese Szene ist mit bloßem Auge nicht erkennbar, denn der Roboter, der die Arbeitsgänge ausführt, ist ein Mikroroboter. Er kann Bewegungen im Nanometerbereich vollführen, also kleinste Objekte, wie zum Beispiel Kohlenstoff-Nanoröhren hundertmal kleiner als ein Haar handhaben, ohne sie zu zerstören. Visuell überwacht und gesteuert wird die Arbeit des Roboters über ein Rasterelektronenmikroskop. Damit eröffnen sich völlig neue Möglichkeiten z.B. in der Mikrosystemtechnik (neue Sensoren und Aktoren), der Medizin (minimal-invasive chirurgische Techniken) oder der (Bio-)Nanotechnologie (Charakterisierung und Manipulation von Molekülen und biologischen Zellen).
Präsentiert werden ein Mikroroboter und einige Komponenten eines Nanohandlingsystems (Mikrorobotik-Exponat mit PC). Hierdurch wird für die Besucher/innen der Bezug zur realen Welt hergestellt.
18.00 23.00 Uhr, Ringebene W3, Demonstration
![]() Programmieren kinderleicht
Programmieren kinderleicht
Prof. Dr. Ira Diethelm, Department für Informatik
Denken Sie auch, Programmieren sei schwer und nur etwas für Freaks? Von wegen! In diesen Workshops der Abteilung Informatik in der Bildung können Kinder und Erwachsene in kurzer Zeit kleine Computerspiele selber entwickeln. Mit der kindgerechten und motivierenden Programmierumgebung Scratch ist das selbst für Kinder im Grundschulalter kein Problem. So verstehen Sie ein bisschen besser, wie Computer ticken und werden ganz nebenbei vom Anwender zum kreativen Computerspiel-Entwickler.
18.00 23.00 Uhr, Ringebene W3, Workshop, Mitmachexperiment
![]() Projektgruppe StreamCars Datenstrommanagement und Sensordatenfusion in intelligenten kooperativen Fahrzeuganwendungen
Projektgruppe StreamCars Datenstrommanagement und Sensordatenfusion in intelligenten kooperativen Fahrzeuganwendungen
Dipl.-Inform. André Bolles, PD Dr. Frank Köster,Prof. Dr. Daniela Nicklas, Department für Informatik
In der Projektgruppe StreamCars entwickelt eine studentische Arbeitsgruppe in Zusammenarbeit mit dem Deutschen Zentrum für Luft- und Raumfahrt (DLR) in Braunschweig neuartige Fahrerassistenzsysteme mit Hilfe eines sogenannten Datenstrommanagementsystems. Die Idee ist dabei, die durch verschiedene Sensoren (Radar, Kamera, etc.) gemessen Informationen ähnlich wie in Datenbanken zur Verfügung zu stellen und dem Fahrzeug die Möglichkeit des aktiven Eingriffs in die Steuerung zu ermöglichen. So kann bspw. ein adaptiver Tempomat realisiert werden, der ein automatisches Bremsmanöver umsetzt. Demonstriert wird hier ein Prototyp anhand eines Fahrsimulators.
18.00 23.00 Uhr, W1 0-012, Demonstration, Informationsstand, Mitmachexperiment
Prof. Dr.-Ing. Axel Hahn, Department für Informatik
 Das Ziel des Projektes ReACT besteht darin, ein System zu entwickeln, das die Teleoperation eines Transporters mittels eines geeigneten PCs oder Mobiltelefons ermöglicht. Als Transporter wird im Projekt ein Elektroscooter verwendet. Die Aufgabe des Scooters ist es, ein Objekt von einem Punkt zu einem anderen zu transportieren. Der Scooter wird über ein Mobiltelefon ferngesteuert, auf dem zusätzlich ein Videobild vom Scooter dargestellt wird. Hierdurch wird es dem Benutzer ermöglicht, den Scooter auch ohne direkten Sichtkontakt zu steuern.
Das Ziel des Projektes ReACT besteht darin, ein System zu entwickeln, das die Teleoperation eines Transporters mittels eines geeigneten PCs oder Mobiltelefons ermöglicht. Als Transporter wird im Projekt ein Elektroscooter verwendet. Die Aufgabe des Scooters ist es, ein Objekt von einem Punkt zu einem anderen zu transportieren. Der Scooter wird über ein Mobiltelefon ferngesteuert, auf dem zusätzlich ein Videobild vom Scooter dargestellt wird. Hierdurch wird es dem Benutzer ermöglicht, den Scooter auch ohne direkten Sichtkontakt zu steuern.
18.00 23.00 Uhr, Raum W1,1-109 Demonstration, Experiment